English
English 中文简体
中文简体 русский
русский Español
Español عربى
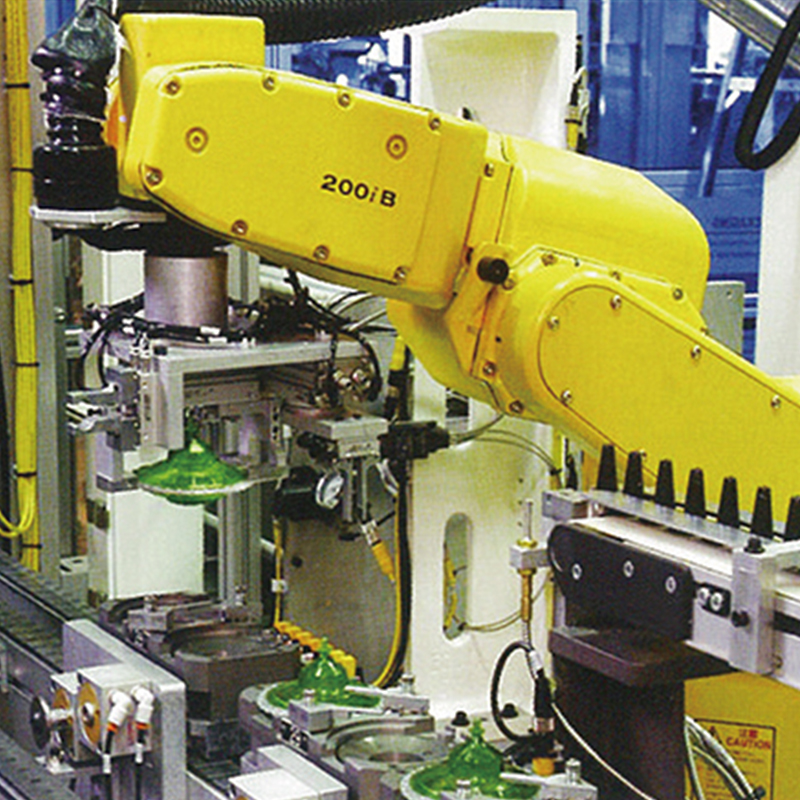
عربى智能机械手的机械原理主要包括以下几个方面:
1、结构:智能机械手通常由多个关节和连杆组成可移动的机械结构。各关节由电机和传动装置驱动,可实现各关节的运动,从而实现机械手的灵活操作。
2、机械传动:智能机械手的关节通常通过传动装置(如齿轮、传动带等)进行驱动。传动装置将电机的旋转转换为关节的运动,使机械手能够进行准确的抓取和操作。
3、理论力学:智能机械手的运动可以通过理论力学中的运动学和动力学来描述和分析。运动学研究机械臂的几何特性、位置和速度之间的关系,而动力学研究机械臂在力和力矩作用下的运动模式。
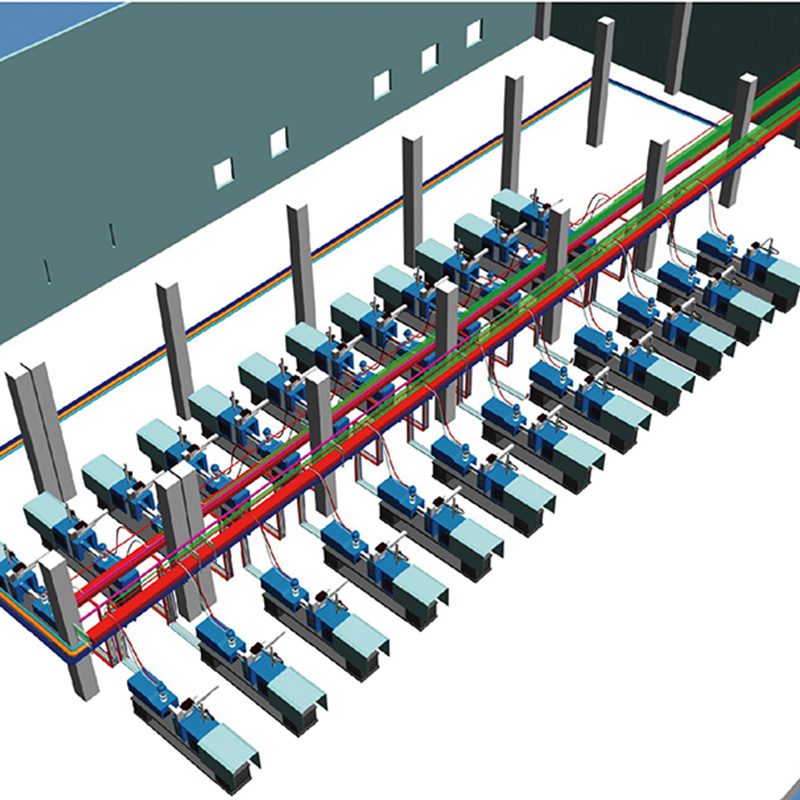
4、控制系统:智能机械手通常配备控制系统,控制电机实现机械手的准确运动。控制系统可以结合传感器和编程技术,实现智能机械手根据任务要求的自动化操作。
一般来说,智能机械手的机械原理是基于机械结构、传动装置和控制系统的综合应用,实现机械手的灵活运动和准确操作。